A Beacon-based Approach for RF Source localization in Outdoor NLOS Environment for Search and Rescue Missions
DOI:
https://doi.org/10.48048/tis.2021.685Keywords:
Beacon-based approach, NLOS environment, RF source localization, Rural areas, Search and rescue missionsAbstract
Due to its low implementation cost, the combination of the Received Signal Strength (RSS) with the Angle of Arrival (AOA) measurements is one of the solutions for Radio Frequency (RF) source localization, especially in a Non-Line of Sight (NLOS) environment. It is critical to determine the search space for a person who is lost in rural areas where the mobile network is unavailable due to a lack of Base Tower Stations (BTS) in order to reduce search time. In this paper, we introduce a new beacon-based approach for RF source localization, where the RF signal is received in NLOS after 1-bounce reflection, by combining the information coming from both the RSS-AOA sensors and the beacons, which are used as helpers- that move along a determined path. The proposed approach relies on determining the reflector’s pose first, after which the RF source is localized. The work has been verified in simulation and the Root Mean Square Error (RMSE) is used as a performance metric for RF source localization. Results show that our proposed approach has the lowest RMSE among localization methods mentioned in the literature under the same conditions.
HIGHLIGHTS
- A new beacon-based approach for RF source localization in Non-Line Of Sight (NLOS) condition
- A reflector’s pose is determined based on the signal received from beacons
- The reflector’s pose is used to determine the location of the RF source
- One bounce reflection is considered since the chance of receiving RF signal with more reflections is very low
GRAPHICAL ABSTRACT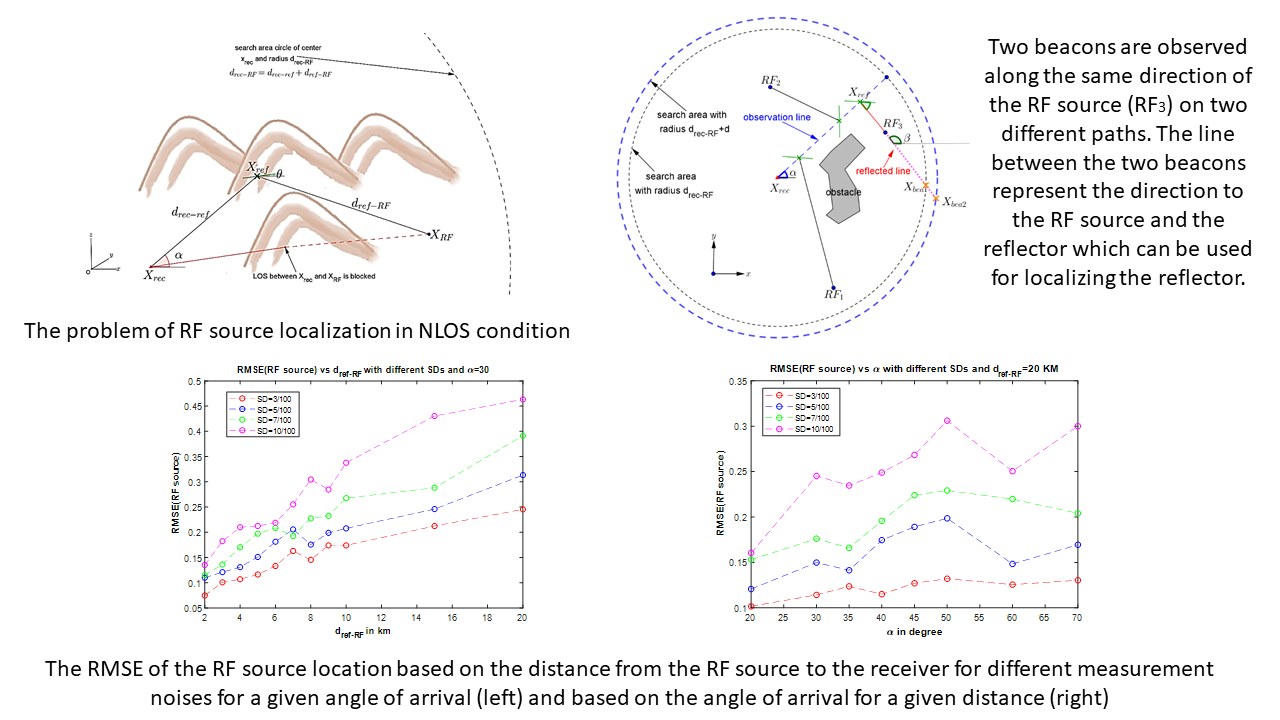
Downloads
References
R Severino and M Alves. Engineering a search and rescue application with a wireless sensor network-based localization mechanism. In: Proceedings of the 2007 IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks, Espoo, Finland. 2007, p. 1-4.
P Kristalina, A Pratiarso, T Badriyah and ED Putro. A wireless sensor networks localization using geometric triangulation scheme for object tracking in urban search and rescue application. In: Proceeding of the 2nd International Conference on Science in Information Technology, Balikpapan, Indonesia. 2016, p. 254-9.
S Zorn, R Rose, A Goetz and R Weigel. A novel technique for mobile phone localization for search and rescue applications. In: Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland. 2010, p. 1-4.
MHA Meniem, AM Hamad and E Shaaban. Fast and accurate practical positioning method using enhanced-lateration technique and adaptive propagation model in GSM mode: Case study using android smart phone in Egypt roads. Int. J. Comput. Sci. Issues 2012; 9, 188-93.
S Haidari, H Moradi and SM Dehghan. Improving localization in NLOS condition using RF beacons. In: Proceedings of the 4th International Conference on Robotics and Mechatronics, Tehran, Iran. 2016, p. 272-7.
S Haidari, H Moradi, M Shahabadi and SM Dehghan. RF source localization using reflection model in NLOS condition. In: Proceedings of the 4th International Conference on Robotics and Mechatronic, Tehran, Iran. 2016, p. 601-6.
AL Adams, TA Schmidt, CD Newgard, CS Federiuk, M Christie, S Scorvo and MD Freest. Search is a time-critical event: When search and rescue missions may become futile. Wilderness Environ. Med. 2007; 18, 95-101.
Z Ma and K Ho. TOA localization in the presence of random sensor position errors. In: Proceeding of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing, Prague, Czech Republic. p. 2468-71.
S Lee, W Lee and K You. TDOA based UAV localization using dual-EKF algorithm. In: D Slezak, TH Kim, A Stoica and BH Kang (Eds.). Control and automation. Springer, Berlin, Heidelberg, 2009, p. 47-54.
HJ Du and JP Lee. Passive geolocation using TDOA method from UAVs and ship/land-based platforms for maritime and littoral area surveillance. Defence R&D Canada, Ottawa, Canada, 2004.
SMM Dehghan, MS Tavakkoli and H Moradi. Path planning for localization of an RF source by multiple UAVs on the Crammer-Rao lower bound. In: Proceedings of the 2013 First RSI/ISM International Conference on Robotics and Mechatronics, Tehran, Iran. 2013, p. 68-73.
SMM Dehghan, H Moradi and SAA Shahidian. Optimal path planning for DRSSI based localization of an RF source by multiple UAVs. In: Proceedings of the 2nd RSI/ISM International Conference on Robotics and Mechatronics, Tehran, Iran. 2014, p. 558-63.
C Cheng, W Hu and WP Tay. Localization of a moving non-cooperative RF target in NLOS environment using RSS and AOA measurements. In: Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing, South Brisbane, QLD, Australia. 2015, p. 3581-5.
W Xu, F Quitin, M Leng, WP Tay and SG Razul. Distributed localization of a RF target in NLOS environments. IEEE J. Sel. Area. Comm. 2015; 33, 1317-30.
F Dai, Y Liu and L Chen. A hybrid localization algorithm for improving accuracy based on RSSI/AOA in wireless network. In: Proceedings of the 2012 International Conference on Computer Science and Service System, Nanjing, China. 2012, p. 631-4.
G Ding, Z Tan, L Zhang, Z Zhang and J Zhang. Hybrid TOA/AOA cooperative localization in non-line-of-sight environments. In: Proceedings of the 2012 IEEE 75th Vehicular Technology Conference, Yokohama, Japan. 2012, p. 1-5.
C Wan, A Mita and S Xue. Non-line-of-sight beacon identification for sensor localization. Int. J. Distr. Sensor Network. 2012; 8, 459590.
C Sha and RC Wang. A type of localization method using mobile beacons based on spiral-like moving path for wireless sensor networks. Int. J. Distr. Sensor Network. 2013; 9, 404568.
N Rajagopal, S Chayapathy, B Sinopoli and A Rowe. Beacon placement for range-based indoor localization. In: Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation, Alcala de Henares, Spain. 2016, p. 1-8.
M Alain and BH Irene. Indoor positioning through fingerprinting technics: How many beacons should be deployed and where? In: Proceedings of the 20th International Symposium on Wireless Personal Multimedia Communications, Bali, Indonesia. 2017, p. 522-8.
M Fares, H Moradi, M Shahabadi and S Nasiri. Target localization in NLOS condition using beacons to determine reflector orientation. In: Proceedings of the 6th RSI International Conference on Robotics and Mechatronics, Tehran, Iran. 2018, p. 178-82.
JJ Leonard and HF Durrant-Whyte. Mobile robot localization by tracking geometric beacons. IEEE Trans. Robot Autom. 1991; 7, 376-82.
ML Sichitiu and V Ramadurai. Localization of wireless sensor networks with a mobile beacon. In: Proceedings of the 2004 IEEE International Conference on Mobile Ad-hoc and Sensor Systems, Fort Lauderdale, FL, USA. 2004, p. 174-83.
MH Fares, H Moradi and M Shahabadi. SLTR: Simultaneous localization of target and reflector in NLOS condition using beacons, Available at: https://arxiv.org/abs/1911.03940, accessed January 2021.
S Haidari, H Moradi and S Dehghan. RF source localization using obstacles map and reflections. Int. J. Ind. Electron. Contr. Optim. 2021; 4, 181-90.
SMM Dehghan and H Moradi. SLAM-inspired simultaneous localization of UAV and RF sources with unknown transmitted power. Trans. Inst. Meas. Contr. 2016; 38, 895-907.
P Pathania, P Kumar and BS Rana. Performance evaluation of different path loss models for broadcasting applications. Am. J. Eng. Res. 2014; 3, 335-42.
SM Dehghan, S Haidari and H Mordi. Toward aerial simultaneous target localization and obstacle estimation using RSSI observations. In: Proceedings of the 3rd RSI International Conference on Robotics and Mechatronics, Tehran, Iran. 2015, p. 517-22.

Downloads
Published
How to Cite
Issue
Section
License

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.