Adaptive Phase Lead Compensation for Model Uncertainties Problem of Autonomous Land Vehicles in Irregular Milieus
DOI:
https://doi.org/10.48048/tis.2022.4496Keywords:
Model uncertainties, Adaptive control, Phase lead compensator, Autonomous Land VehiclesAbstract
In this research paper, digital and analog adaptive phase lead control schemes for model uncertainties problem are proposed to Autonomous Land Vehicles (ALV) in highly irregular environments. The developed compensators are used to improve control performances and maintain robustness against uncertainties and external disturbances. To consider real soil changes and irregularities, 2 approaches are addressed: The 1st approach is a digital phase lead controller synthesized to keep closed loop performances in spite of analog system uncertainties. The 2nd control strategy rests on adaptive analog compensator to reduce model uncertainties impact using programmable resistors. Both control approaches are theoretically detailed, and then implemented on a test bed to compare real time results in terms of accuracy and rapidity in the model uncertainties case.
GRAPHICAL ABSTRACT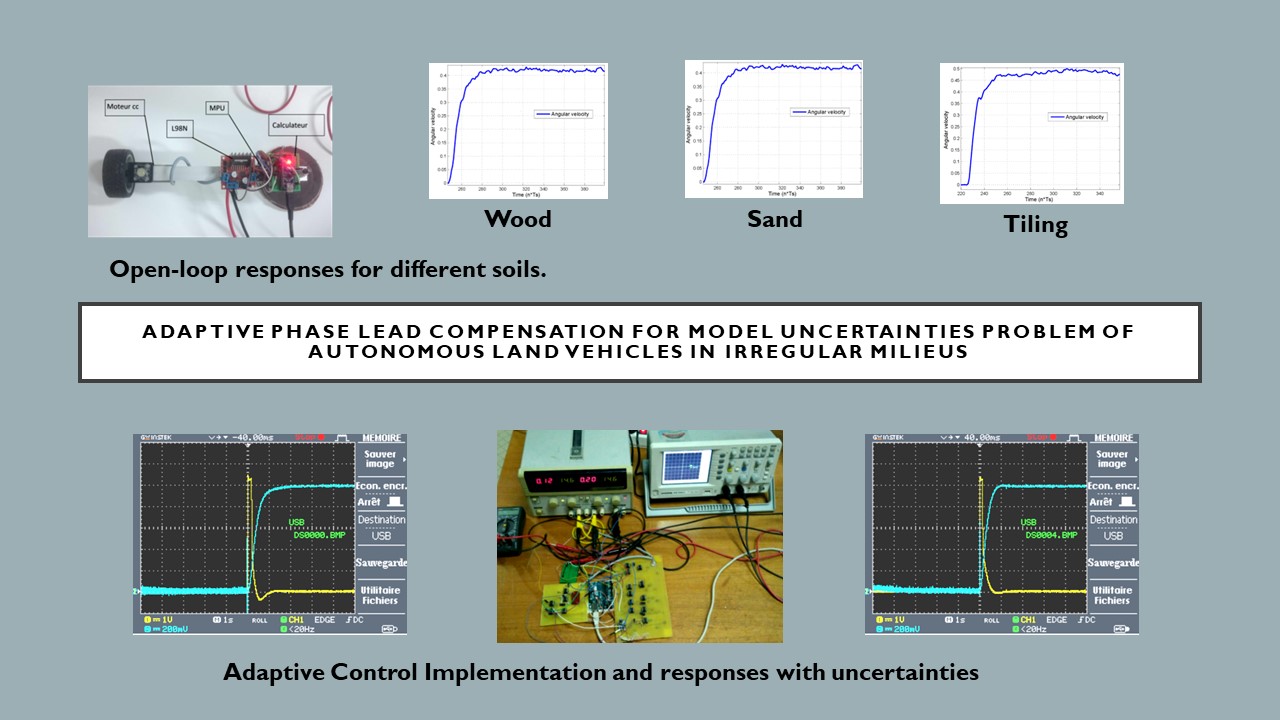
Downloads
References
Z Huang, X Xu, H He, J Tan and Z Sun. Parameterized batch reinforcement learning for longitudinal control of autonomous land vehicles. IEEE Trans. Syst. Man Cybern. Syst. 2017; 49, 730-41.
AD Luca, G Oriolo and M Vendittelli. Control of wheeled mobile robots: An experimental overview. In: S Nicosia, B Siciliano, A Bicchi and P Valigi (Eds.). Ramsete. Springer, Berlin, Heidelberg, Germany, 2001, p. 181-226.
P Coelho and U Nunes. Path-following control of mobile robots in presence of uncertainties. IEEE Trans. Robot. 2005; 21, 252-61.
P Lamon and R Siegwart. Wheel torque control in rough terrain-modelling and simulation. In: Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain. 2005, p. 867-72.
L Caracciolo, AD Luca and S Iannitti. Trajectory tracking control of a four-wheel differentially driven mobile robot. In: Proceedings of the IEEE International Conference on Robotics and Automation, Detroit, Michigan. 1999, p. 2632-8.
ML Corradini and G Orlando. Control of mobile robots with uncertainties in the dynamical model: A discrete time sliding mode approach with experimental results. Control Eng. Pract. 2002; 10, 23-34.
W Dong and KD Kuhnert. Robust adaptive control of nonholonomic mobile robot with parameter and nonparameter uncertainties. IEEE Trans. Robot. 2005; 21, 261-6.
ZP Jiang and H Nijmeijer. Tracking control of mobile robots: A case study in backstepping. Automatica 1997; 33, 1393-9.
BS Park, SJ Yoo, JB Park and YH Choi. Adaptive neural sliding mode control of nonholonomic wheeled mobile robots with model uncertainty. IEEE Trans. Control Syst. Technol. 2009; 17, 207-14.
MS Kim, JH Shin, SG Hong and JJ Lee. Designing a robust adaptive dynamic controller for nonholonomic mobile robots under modelling uncertainty and disturbances. Mechatronics 2003; 13, 507-19.
AK Khalaji. Modelling and control of uncertain multibody wheeled robots. Multibody Syst. Dyn. 2019; 46, 257-79.
N Lobontiu. Time- and frequency-domain controls of feedback systems. In: System dynamics for engineering students, Academic Press, London, 2018, p. 647-708.
W Bolton. Frequency response. In: Instrumentation and control systems. 3rd eds. Newnes, Oxford, 2021, p. 257-86.
Downloads
Published
How to Cite
Issue
Section
License

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.