Input Shaping for Flexible Systems with Non-Zero Initial Conditions
DOI:
https://doi.org/10.48048/tis.2024.7193Keywords:
Vibration control, Input shaping, Residual vibrations, Non-zero initial conditions, Nonlinear vibratory systems, Flexible systems, Work and energy methodAbstract
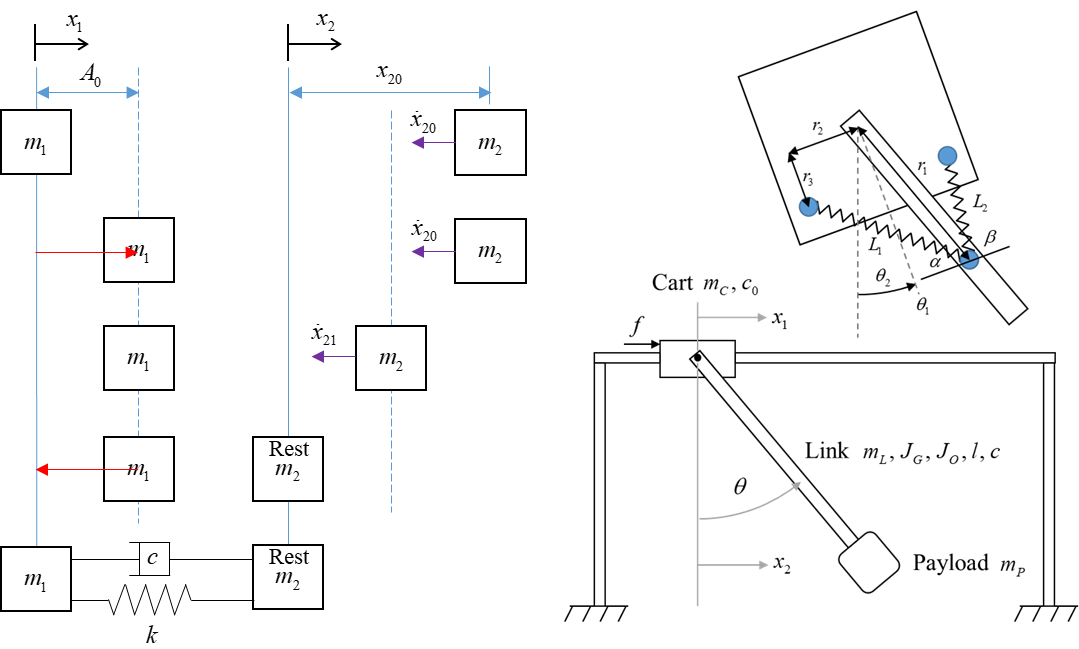
Input shaping is a finite-impulse response (FIR) filter whose coefficients are designed to produce a shaped input that avoids exciting lightly-damped modes. As a result, flexible systems can be commanded to move quickly from point to point with minimum residual vibration. However, traditional input shaping techniques assume zero initial conditions, limiting their usability for systems with non-zero initial conditions, such as, emergency stops of cranes. Besides, in practice, movement of flexible systems is often initiated when the systems are not completely stationary. In these situations, the performance of the input shaping technique deteriorates. In this paper, a modification of shaper’s impulse sequence at the beginning of the move is proposed to bring the moving flexible system to a stop before commencing movement. The modification utilizes the work and energy method to determine the distance and time as functions of the initial states for base excitation of flexible systems, rendering its application to nonlinear systems. By concatenating this modification with the existing input shapers, a novel shaper called the non-zero initial conditions zero-vibration-derivative (NI-ZVDk) input shaper is introduced. The NI-ZVDk input shaper effectively prevents the movement of flexible systems from their initial states. To demonstrate the effectiveness of the approach, a 2-mass system is utilized as a benchmark for general flexible systems with 2 degrees of freedom. Various types of motion, including pure translation, pure rotation, and combined translation-rotation, are considered. Extensive simulation results showed that, using the proposed NI-ZVDk input shaper, the flexible systems can move from non-zero initial conditions to their desired destinations with less time and less residual vibration.
HIGHLIGHTS
- The Input Shaping (IS) technique is used to suppress residual vibrations by creating destructive interference in impulse responses
- This method presents a novel design modification for IS when initial conditions are non-zero
- This technique can be extended for use in various nonlinear vibratory systems
- For example, it can be used when a crane needs to stop abruptly from non-zero initial conditions without residual vibrations
GRAPHICAL ABSTRACT
Downloads
References
A Alshaya and K Kuwait. Command shaping control of a multi-mode flexible system. In: Proceedings of the 8th International Conference on Control, Decision and Information Technologies, Istanbul, Turkey. 2022, p. 206-11.
H Ameura, PL Moal, G Bourbona, C Vuillemin and M Sworowski. Suppressing residual vibrations in comb-drive electrostatic actuators: A command shaping technique adapted to nomadic applications. Sensor. Actuator. Phys. 2022; 334, 113366.
W Chatlatanagulchai and T Benjalersyarnon. Closed-loop input shaping with quantitative feedback controller applied to slewed two-staged pendulum. Walailak J. Sci. Tech. 2016; 13, 595-613.
W Chatlatanagulchai and D Kijdech. Outside-the-loop input shaping with quantitative feedback control for flexible systems having non-zero initial conditions. In: Proceedings of the 6th Thai Society of Mechanical Engineers, Cha-Am, Phetchaburi, Thailand. 2015.
T Chen and J Shan. Cooperative transportation of cable-suspended slender payload using two quadrotors. In: Proceedings of the IEEE International Conference on Unmanned Systems, Beijing, China. 2019, p. 432-7.
T Chen and J Shan. Fixed-time consensus control of multiagent systems using input shaping. IEEE Trans. Ind. Electron. 2019; 66, 7433-41.
KS Chen, TS Yang and JF Yin. Residual vibration suppression for duffing nonlinear systems with electromagnetical actuation using nonlinear command shaping techniques. J. Vib. Acoust. 2006; 128, 778-89.
KS Chen, TS Yang, KS Ou and JF Yin. Design of command shapers for residual vibration suppression in duffing nonlinear systems. Mechatronics 2008; 19, 184-98.
A Dhanda, J Vaughan and W Singhose. Optimal input shaping filters for non-zero initial states. In: Proceedings of the American Control Conference, Missouri. 2009.
A Dhanda, J Vaughan and W Singhose. Vibration reduction using near time-optimal commands for systems with nonzero initial conditions. J. Dyn. Syst. Meas. Contr. 2016; 138, 041006.
C Do, M Lishchynska, M Cychowski, K Delaney and M Hill. Energy-based approach to adaptive pulse shaping for control of RF-MEMS DC-contact switches. J. Microelectromech. Syst. 2012; 21, 1382-91.
D Duan, C Zhang, Z Wang and J Li. Active control for helicopters with slung load by combining ADRC and input shaper technology. In: Proceedings of the Chinese Control and Decision Conference, Hefei, China. 2020, p. 5368-73.
M Fliess and H Sira-Ramirez. Closed-loop parametric identification for continuous-time linear systems via new algebraic techniques. In: H Garnier and L Wang (Eds.). Identification of Continuous-Time Models from Sampled Data. Springer, London, 2008, p. 363-91.
J Fortgang, V Patrangenaru and WE Singhose. Scheduling of input shaping and transient vibration absorbers for high-rise elevators. In: Proceedings of the American Control Conference, Minneapolis, Minnesota. 2006, p. 1772-7.
KT Hong and KS Hong. Input shaping and VSC of container cranes. In: Proceedings of the IEEE on Control Applications, Taipei, Taiwan. 2004, p. 1570-5.
DM Garcia-Sanz. Quantitative feedback theory. In: J Baillieul and T Samad (Eds.). Encyclopedia of Systems and Control. Springer, London, 2014.
JR Huey, KL Sorensen and WE Singhose. Useful applications of closed-loop signal shaping controllers. Contr. Eng. Pract. 2008; 16, 836-46.
S Ichikawa, A Castro, N Johnson, H Kojima and W Singhose. Dynamics and command shaping control of quadcopters carrying suspended loads. IFAC PapersOnLine 2018; 51, 84-8.
HI Jaafar, Z Mohamed, MA Shamsudin, NAM Subha, L Ramli and AM Abdullahi. Model reference command shaping for vibration control of multimode flexible systems with application to a double-pendulum overhead crane. Mech. Syst. Signal Process. 2019; 115, 677-95.
J Kim and EA Croft. Preshaping input trajectories of industrial robots for vibration suppression. Robot. Comput. Integrated Manuf. 2018; 54, 35-44.
KC Kozak. 2003, Robust command generation for nonlinear systems. Ph. D. Dissertation. Georgia Institute of Technology, Georgia.
JH Montonen, N Nevaranta, M Niemelä and T Lindh. Comparison of extrainsensitive input shaping and swing-angle-estimation-based slew control approaches for a tower crane. Appl. Sci. 2022; 12, 5945.
D Newman, SW Hong and JE Vaughan. Eliminating nonzero initial states in flexible systems through specified insensitivity input shaping. In: Proceedings of the American Control Conference, Wisconsin. 2018, p. 3374-9.
D Newman, SW Hong and JE Vaughan. The design of input shapers which eliminate nonzero initial conditions. J. Dyn. Syst. Meas. Contr. 2018; 140, 101005.
D Newman1, J Vaughan and SW Hong. Eliminating initial oscillation in flexible systems by the pole-zero cancellation input shaping technique. In: the 7th International Conference of Asian Society for Precision Engineering and Nanotechnology, Seoul, Korea. 2017.
E Pereira, JR Trapero, IM Diaz and V Feliu. Adaptive input shaping for manoeuvring flexible structures using an algebraic identification technique. Automatica 2009; 45, 1046-51.
PT Pham, QC Nguyen, M Yoon and KS Hong. Vibration control of a nonlinear cantilever beam operating in the 3D space. Sci. Rep. 2022; 12, 13811.
MA Salim, A Saad, C Photong, MZ Zain, AR Bakar, NM Yusof and MZ Akop. Modelling and estimation on vibration and noise level of the dynamic wiper system using input shaping strategy. Int. J. Nanoelectronics Mater. 2021; 14, 311-32.
P Shah. 2020, Joint feedback feedforward data driven control design and input shaping techniques for multi actuator hard disk drives. Ph. D. Dissertation. University of California, Berkeley.
NC Singer and WC Seering. Preshaping command inputs to reduce system vibration. J. Dyn. Syst. Meas. Contr. 1990; 112, 76-82.
OJM Smith. Posicast control of damped oscillatory systems. Proc. IRE 1957; 45, 1249-55.
JY Smith, K Kozak and WE Singhose. Input shaping for a simple nonlinear system. In: Proceedings of the American Control Conference, Alaska. 2002, p. 821-6.
Y Sun, M Yang, Y Chen, J Long, J Cao and D Xu. Trajectory error eliminates of input shaping on X-Y platform by Phase Erro feedforward control. In: Proceedings of the 22nd International Conference on Electrical Machines and Systems, Harbin, China. 2019.
HD Tho, A Kaneshige and K Terashima. Minimum-time S-curve commands for vibration-free transportation of an overhead crane with actuator limits. Contr. Eng. Pract. 2020; 98, 104390.
DK Thomsen, R Søe-Knudsen, O Balling and X Zhang. Vibration control of industrial robot arms by multi-mode time-varying input shaping. Mech. Mach. Theor. 2021; 155, 104072.
MD Ulriksena, D Bernalb, ME Nielsena and L Damkildea. Damage localization in offshore structures using shaped inputs. Proc. Eng. 2017; 199, 2282-7.
JM Veciana, S Cardona and P Català. Minimizing residual vibrations for non-zero initial states: Application to an emergency stop of a crane. Int. J. Precis. Eng. Manuf. 2013; 14, 1901-8.
A Wahrburg, J Jurvanen, M Niemelä and M Holmberg. Input shaping for non-zero initial conditions and arbitrary input signals with an application to overhead crane control. In: Proceedings of the IEEE 17th International Conference on Advanced Motion Control, Padova, Italy. 2022, p. 36-41.
W Wang, C Hu, K Zhou and Z Wang. Time parameter mapping and contour error precompensation for multi-axis input shaping. IEEE Trans. Ind. Informat. 2022; 19, 2640-51.
H Yavuza and S Beller. An intelligent serial connected hybrid control method for gantry cranes. Mech. Syst. Signal Process. 2021; 146, 107011.
HL Zhang, X Lu, DP Jia, BJ Zhao, T Zhang, Y Liu and HY Yan. Position control of XY precision planar motion table based on input shaping filter. In: Proceedings of the 2nd International Conference on Electronics, Communications and Information Technology, Sanya, China. 2021, p. 835-9.
W Zhu, Q Zong and B Tian. Adaptive tracking and command shaped vibration control of flexible spacecraft. IET Contr. Theor. Appl. 2019; 13, 1121-8.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Walailak University

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.