A Novel Approach of Marine Ecosystem Monitoring System with Multi-Sensory Submarine on Robotic Platform for Visualizing the Climate Change Effect over Oceanic Environment
DOI:
https://doi.org/10.48048/tis.2022.4205Keywords:
Underwater surveillance, Marine ecosystem, Sensor data streaming, Precision control, NavigationAbstract
It is obvious that the whole world is so much concerned about the terrifying escalation of climate change in the recent time period. This climate change effect can be visible in the land, atmospheric and oceanic area simultaneously. Though there have been multiple attempts of proposing solutions concerning the protection for the land area environmental balance, monitoring and surveillance. But unfortunately there have been a very handful of research work which predominantly concerns about the protection upon the environmental state of marine biological species and its ecosystem. So, the following research study proposes a solution which appears to be a full-fledged Bluetooth controlled Submarine prototype with a sensory chipboard attached inside its endo-skeleton which contains multiple sensors like DHT11 temperature-humidity, dust, CO2 and YL69 pH sensors. The sensory data provides the information of underwater whether the naval environment is habitable for the marine biological species or not, under the terrible effect of global climate change. The submarine prototype is fully functional in the surface and underwater scenario which contains a very unique mechanical design and circuitry with an exceptional sensor data streaming capability which can be used by marine biological researchers and oceanographers professionally as a full-fledged marine ecosystem monitoring device.
HIGHLIGHTS
- Climate change is causing a very alarming effect in the oceanic area which is constantly threatening the future of marine biological species. The paper focuses on the constant monitoring over spacies with the help of a multi-sensory submarine with real time sensory data and remote navigation
- The unique clustering of multi-sensory circuity makes the sensory data more reliable while the vacuum controlled hydraulic pump motors make the navigation and diving of the submarine prototype very precise
and swift - The navigation can be controlled with a globally unique and customized Submarine Navigator Smartphone Application
- The multi-sensory marine species monitoring submarine prototype appears to be a torch-bearer of the amalgamation of the fields such as IOT-Sensors and Robotics which paves the way for further IOT and Naval Robotics Research
GRAPHICAL ABSTRACT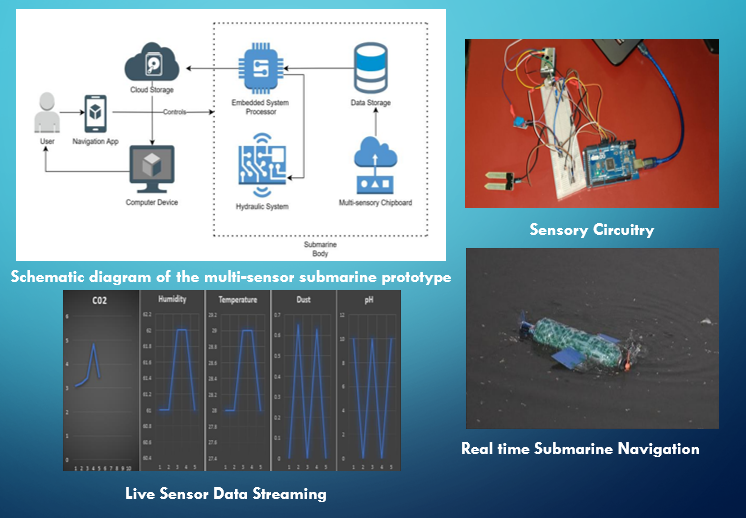
Downloads
References
CDG Harley, AR Hughes, KM Hultgren, BG Miner, CJB Sorte, CS Thornber, LF Rodriguez, L Tomanek and SL Williams. The impacts of climate change in coastal marine systems. Ecol. Lett. 2006; 9, 228-41.
P Wassmann, CM Duarte, S Agustí and MK Sejr. Footprints of climate change in the Arctic marine ecosystem. Glob. Change Biol. 2011; 17, 1235-49.
K Shafique, BA Khawaja, F Sabir, S Qazi and M Mustaqim. Internet of Things (IoT) for next-generation smart systems: A review of current challenges, future trends and prospects for emerging 5G-IoT scenarios. IEEE Access 2020; 8, 23022-40.
JO Ighalo, AG Adeniyi and G Marques. Internet of things for water quality monitoring and assessment: A comprehensive review. In: A Hassanien, R Bhatnagar and A Darwish (Eds.). Artificial intelligence for sustainable development: Theory, practice and future applications. Springer, Cham, Switzerland, 2021, p. 245-59.
F Wu, C Qiu, T Wu and MR Yuce. Edge-based hybrid system implementation for long-range safety and healthcare IoT applications. IEEE Internet Things J. 2021; 8, 9970-80.
T Wei, W Feng, Y Chen, C Wang, N Ge and J Lu. Hybrid satellite-terrestrial communication networks for the maritime internet of things: Key technologies, opportunities, and challenges. IEEE Internet Things J. 2021; 8, 8910-34.
S Udupa, N Joshi and S Raman. Design, analysis and control of an autonomous underwater surveillance robot. In: Proceedings of the IEEE International Conference on Consumer Electronics-Asia, Bengaluru, India. 2017, p. 121-6.
G Ferri, A Munafo, A Tesei and K LePage. A market-based task allocation framework for autonomous underwater surveillance networks. In: Proceedings of the Oceans 2017 - Aberdeen, Aberdeen. 2017, p. 1-10.
CL Kuo, CK Tsui, NS Pai, CH Lin, SC Chen and PW Li. A PID controller for the underwater robot station-keeping. In: Proceedings of the IEEE 14th International Conference on Industrial Informatics, Poitiers, France. 2016, p. 1242-6.
HT Choi, S Kim, J Choi, Y Lee, TJ Kim and JW Lee. A simplified model based disturbance rejection control for highly accurate positioning of an underwater robot. In: Proceedings of the 2014 Oceans - St. John’s, St. John’s, Newfoundland and Labrador, Canada. 2014, p. 1-5.
I Vasilescu, P Varshavskaya, K Kotay and D Rus. Autonomous Modular Optical Underwater Robot (AMOUR) design, prototype and feasibility study. In: Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain. 2005, p. 1603-9.
G Ferri, J Bates, P Stinco, A Tesei and K LePage. Autonomous underwater surveillance networks: A task allocation framework to manage cooperation. In: Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans, Kobe, Japan. 2018, p. 1-10.
S Nautiyal and A Mehta. Autonomous underwater surveillance robot. IOSR J. Electron. Commun. Eng. 2015; 1, 53-61.
M Dunbabin, P Corke, I Vasilescu and D Rus. Data muling over underwater wireless sensor networks using an autonomous underwater vehicle. In: Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, Florida. 2006, p. 2091-8.
P Braca, R Goldhahn, G Ferri and KD LePage. distributed information fusion in multistatic sensor networks for underwater surveillance. IEEE Sens. J. 2015; 16, 4003-14.
M Sanap, S Chaudhari, C Vartak and P Chimurkar. HYDROBOT: An underwater surveillance swimming robot. In: Proceedings of the International Conference on Communication, Information & Computing Technology, Mumbai, India. 2018, p. 1-7.
BMM Anwar, MA Ajim and S Alam. Remotely operated underwater vehicle with surveillance system. In: Proceedings of the International Conference on Advances in Electrical Engineering, Dhaka, Bangladesh. 2015, p. 255-8.
AR Subramanian, R Ramkumar, GP Rao, R Sudarsan and R Jayabarathi. Semi autonomous underwater surveillance robot. Int. J. Electron. Electr. Eng. 2014; 7, 13-8.
KJ DeMarco, ME West and AM Howard. Sonar-based detection and tracking of a diver for underwater human-robot interaction scenarios. In: Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Manchester. 2013, p. 2378-83.
E Cayirci, H Tezcan, Y Dogan and V Coskun. Wireless sensor networks for underwater surveillance systems. Ad Hoc Netw. 2006; 1, 431-46.
A Sivasoundari, S Kalaimani and M Balamurugan. Wireless surveillance robot with motion detection and live video transmission. Int. J. Emerg. Sci. Eng. 2013; 1, 14-22.

Downloads
Published
How to Cite
Issue
Section
License

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.